스테핑 모터는 전기 신호에 의해 일정한 각도만큼 회전하는 모터입니다. 스테핑 모터는 전기적인 신호를 받아서 회전을 하는데, 이 신호는 일종의 명령어라고 볼 수 있습니다. 스테핑 모터는 회전을 할 때 한 번에 한 단계씩 일정한 크기의 각도로 이동합니다. 이 글에서 스텝 모터의 작동 원리와 다양한 종류에 대해서 알아보도록 하겠습니다.
스테핑 모터란?
스테핑 모터는 개별 단계로 나뉘어진 브러시리스 DC 모터입니다. 스텝 모터, 스테핑 모터 또는 펄스모터 라고도 불리웁니다. 여러개의 코일이 연결된 모터로서 위상이라는 그룹으로 나뉘어져 있습니다. 각 상을 순차적으로 통전함으로써 모터가 한 단계씩 회전하게 됩니다.
정확한 위치 지정 및/또는 속도 제어가 가능한 컴퓨팅 제어 스테핑 모터로서 많은 정밀 모션 제어 응용 분야에서 선택되는 모터입니다. 스테핑 모터의 장점으로는 특히 특정코일에만 전류를 흘려서 다음 단계로 넘어가기 때문에 쉽게 과열되지 않는 부분이 있습니다. 하지만 단점도 있는데 이는 Open-loop System 방식 입니다. Open loop System을 사용하기 때문에, 현재의 위치에 정확한 정보를 알아 낼수 없다는 것이 단점으로도 볼 수 있습니다. 이 점은 서보모터와의 차이점이라고 볼 수 있습니다. 그래서 스테핑 모터를 사용하는 유저들중에는 위치를 알 수 있도록 별도의 장치를 두는 사람들도 있습니다.
스테핑 모터의 응용 분야는 자동화 및 제조산업에서 사용되며, CNC 기계에서도 정밀한 동작을 수행하는 역할을 합니다. 특히 최근 각광받고 있는 분야로서 3D 프린팅에서도 많은 활용도를 보이고 있어 스테핑 모터의 활용도는 점차 그 범위를 넓혀 가고 있습니다.
스테핑 모터 작동원리
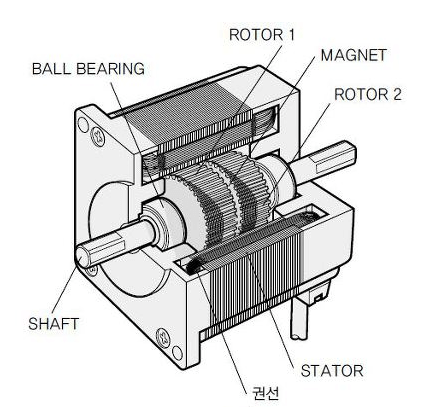
스테핑모터의 구성요소로는 스테핑모터(Stepping motor), 콘트롤러에서 받은 펄스 신호로 스테핑모터의 상을 여자해주는 구동 드라이버(Stepping Motor Drive), 펄스(Pluse)를 발생시켜 펄스를 드라이버에 전달하여 수행하게 하는 컨트롤러 세가지가 있습니다. 이 세가지를 활용하여 스테핑 모터는 한 번에 한 스텝씩 일정한 각도만큼 회전합니다. 어떤식으로 움직이고 회전하는지 이해를 돕기 위해 세부적인 항목을 스텝별로 설명해보겠습니다.
스테핑 모터는 기본적으로 여러 개의 코일로 모터가 구성되어 있습니다. 각 코일에 전기를 흘려서 자기장을 생성합니다. 스테핑 모터의 특정한 코일에 전기가 인가되어 자기장이 생성됩니다. 이것이 첫번째 스텝입니다. 생성된 자기장은 스테핑 모터의 로터(회전 부분)에 있는 영구자석에 영향을 미칩니다. 생성된 자기장에 의해 로터에 있는 영구자석이 반응하여 한 스텝만큼 회전합니다. 이동한 로터는 다음 스텝으로 넘어갑니다. 스테핑 모터는 일반적으로 1.8도씩 회전한다고 알려져 있습니다. 스텝 3에서는 로터가 다음 스텝으로 정확히 이동합니다. 이런 식으로 계속해서 다음 스텝으로 넘어가게 되는 것이 스테핑 모터의 동작 원리 입니다. 다음 스텝으로 이동한 로터는 다시 새로운 코일에 전기를 인가하여 다시 자기장을 생성합니다. 이렇게 반복적으로 주입되는 전기 신호에 따라 로터를 회전시킵니다.
구동방식에 따른 분류
스텝모터의 구동 방식에는 유니폴라(unipolar) 방식과 바이폴라(bipolar) 방식이 있습니다. 유니폴라 방식은 전류가 한쪽방향으로만 흐르는 방식이며, 바이폴라 방식은 전류가 배선의 양쪽 모두로 흐르는 방식입니다. 유니폴라는 바이폴라에 비해 더 많은 배선을 필요로 하게 됩니다. 따라서 2상 6선식의 경우 바이폴라와 유니폴라 모두 가능하지만, 2상 4선식의 경우 바이폴라만이 가능하다.
유니폴라(Unipolar)방식 모터는 권선(코일)에 흐르는 전류가 항상 한쪽 방향으로만 흐르는 구동 방식입니다. 유니폴라 방식은 고속으로 구동시 토크가 높아 탈조 될 위험이 적어 고속회전에 용이하고 구동 회로가 비교적 간단한 것이 장점 입니다. 반면에 단점으로는 모터 코일에 저장된 에너지를 회생 하지 않으므로 효율이 좋지 않습니다. 저속 구간에서 구동시 토크가 바이폴라에 비해 적습니다.
바이폴라(Bipolar)방식 모터는 모터의 권선(코일)에 흐르는 전류의 방향이 바뀌는 구동 방식입니다. 저속 구동시 토크가 높고, 코일에 저장된 전류가 회생 되기 때문에 효율이 무척 높습니다. 바이폴라 방식의 단점으로는 고속 구동시 토크가 급격하게 저하되어 탈조가 발생 할 우려가 있으며 회로의 구성이 복잡한 것이 단점입니다.