서보모터란 로봇의 움직임을 제어하기 위해 산업 현장에서 많이 쓰이는 모터 중 하나입니다. 서보모터는 주로 로봇의 속도, 가속 및 감속, 위치 정보 등을 제어하기 위해 동작합니다. 이 글에선 서보 모터의 동작 원리와 다양한 종류에 대해서 알아보도록 하겠습니다.
서보 모터란 무엇인가?
서보는 서보 메커니즘(Servo Mechanism)의 약어로, “목표치의 임의 변화에 따라 움직이며 제어되는 시스템”을 의미합니다. 즉, 원하는 목표에 도달하기 위해 다양한 변화를 추적하고 설계자의 의도에 맞게 작동하는 제어 시스템입니다. 일반적으로 산업 현장에서는 속도, 가속도, 위치 등을 변화값으로 설정하여 이를 추적하도록 조정합니다. 서보 시스템은 주로 서보 모터와 피드백 회로로 구성된 제어구동보드 두 가지 주요 구성 요소로 이루어져 있습니다. 이렇게 구성된 서보 시스템은 다양한 응용 분야에서 사용되고 있습니다.
DC 서보 모터
DC 모터는 전류의 흐름에 따라 한방향으로만 회전할 수 있으며, 구조가 간단하고 제어가 쉽습니다. DC 모터의 구동원리는 전류가 단자로 공급되고 브러시와 정류자의 마찰로 코일로 전류가 이동하게 됩니다.이에 영구자석이 상호작용하여 자기장을 생성하며 모터를 회전시키게 됩니다. 이 회전을 검출기가 감지하고 제어부로 신호를 보내 움직임을 제어하는 것이 DC서보모터 입니다.
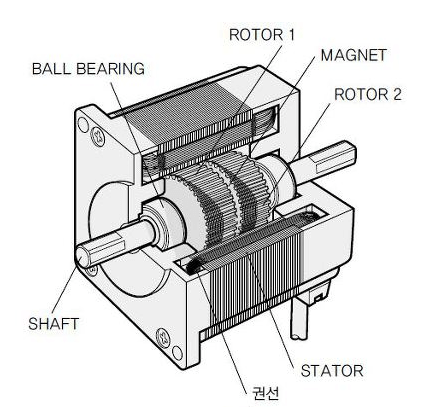
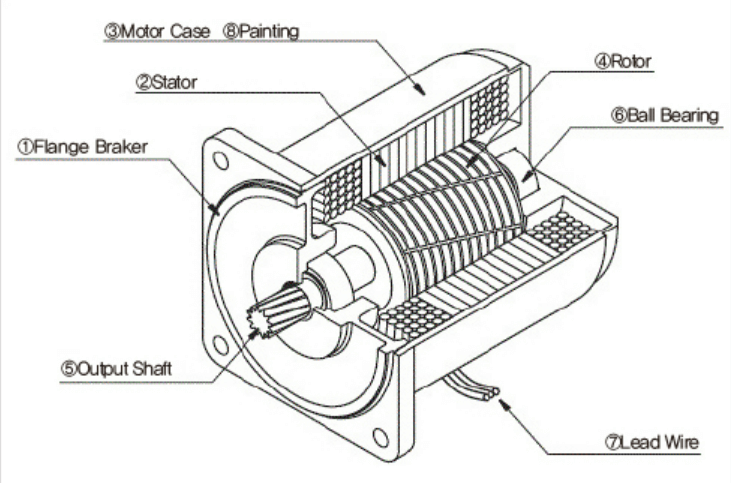
DC 모터의 구성품은 다음과 같습니다. 외부에서 보여지는 금속 케이스, 축, 단자가 있고, 내부에는 영구 자석과, 회전자, 암, 코일, 정류자(회전자 뒤쪽), 브러시, 브러시 홀더(암)가 구성되어 있습니다.
구동방식
전원 공급부에 연결된 단자로 전류가 흐르면, 코일을 통해 전자기장이 생성됩니다. 이 전자기장과 양쪽 영구자석이 상호작용하여 회전 운동이 발생합니다.
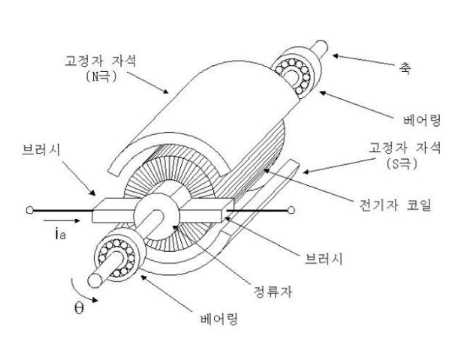
자세히 설명하자면, 단자로부터 전류가 공급되면 브러시를 통해 정류자로 전류가 전달됩니다. 정류자는 축에 고정되어 있고, 브러시는 브러시 홀더와 단자에 고정되어 모터 하부의 커버에 장착됩니다. 전류가 정류자로 전달될 때 마찰이 발생합니다. 전류는 정류자를 통해 모터 내부의 코일(권선)로 이동합니다.
이때 모터 케이스에 장착된 영구 자석과 코일 내부의 전류 흐름을 통해 모터를 회전시킬 수 있는 힘이 발생합니다. 입력 측(정류자 쪽)에서 출력 측(구동부와 연결되는 쪽)으로 움직이는 전류는 코일을 위로 움직이게 하고, 다시 반대로 돌아오는 코일은 아래로 움직이게 하여 축을 회전시킵니다. 모터 뒤쪽에는 DC 모터의 움직임을 감지하는 검출기가 장착되어 있습니다. 이 검출기로는 엔코더나 제너레이터 등이 주로 사용됩니다.
DC 모터에는 정류한계라고 하는 가감속 영역이 존재하며, 이를 넘어서면 섬락 현상(Flashover)이 발생합니다. 또한, DC 모터의 속도가 빠를수록 정류한계가 낮아지기 때문에 고속형 모터로는 적합하지 않습니다. DC 서보모터는 단순히 DC 모터만을 지칭하는 것이 아닙니다. 움직임의 위치 신호를 감지하고 해당 움직임을 제어할 수 있는 제어부가 함께 동작해야 DC 서보모터로 정의됩니다.
여기서 섬락 현상 [閃絡, flashover]에 대해 간단히 설명하자면, 섬락현상이란 두 도체간의 전압 차이에 크게 이상이 생겼을 때 중간에 있던 절연물 표면에 있는 공기를 통해 아크 방전이 일어나는 것을 섬락 현상이라고 합니다.
AC 서보 모터
AC모터는 회전자에 코일이 감겨있는 것이 아니고, 프레임 내부에 코일이 감겨 고정되어 있으며, 회전자에 영구자석이나 도전체가 있어 코일이 생성하는 전자기장과 상호작용하여 움직이게 됩니다. AC 서보모터는 유도형(유도기형), 서보모터(인덕션 모터), 동기형(동기형) 서보모터로 세가지 큰 부류로 분류 할 수 있습니다.
유도기형 AC 서보모터
유도기형은 인덕션 모터와 비슷한 원리를 가지고 있습니다. 하지만 고정자측에는 영구자석 대신 도전체가 결합되어 있습니다. 전기자 부분에는 3가지 상으로 연결된 코일이 있으며, 이 코일들이 삼상으로 유도되어 연속적인 자기장을 생성하여 도전체(로터)를 움직여 모터를 구동시킵니다.
유도기형의 장점은 회전자와 고정자의 상대적인 위치 검출 센서가 필요하지 않으며, 회전자 구조가 간단하다는 것입니다. 그러나 단점으로는 정지 상태에서도 유도 전류를 계속 흘려야 하므로 발열 문제가 발생할 수 있습니다. 또한 비상 정지 시에는 DC 서보모터와 같이 코일을 단락시켜 다이나믹 브레이크를 적용하는 것이 불가능합니다.
요약하자면, 유도기형은 인덕션 모터와 유사한 작동 원리를 가지고 있으며 회전자와 고정자의 상대적인 위치 검출 센서가 필요하지 않고 구조가 간단합니다. 그러나 정지 상태에서도 전류를 유지해야 하므로 발열 문제가 발생할 수 있고, 비상 정지 시에는 다이나믹 브레이크를 사용할 수 없는 단점이 있습니다.
동기기형 AC 서보모터
AC 서보 모터는 대부분 사람들이 생각하는 형태로, 프레임 내부 외벽에 코일이 감겨져 있고 회전자에는 영구자석이 있는 모터입니다. 이 모터는 단순히 생각하면 DC 모터에서 코일과 영구자석의 위치가 바뀐 형태라고 볼 수 있습니다. 브러시리스 DC 서보 모터라고도 불리는 이유는 DC 모터와는 달리 브러시와 정류자 간의 상호작용이 필요하지 않기 때문입니다.
AC 서보 모터는 DC 모터와 유사하게 전기자 잔류와 토크의 관계가 선형적이어서 제동에 용이하며, 코일을 단락시켜 비상 정지 시에 다이나믹 브레이크를 작동시킬 수 있습니다. AC 모터는 정류한계가 존재하지 않기 때문에 고속 회전 영역에서도 최대 토크를 유지할 수 있습니다. 또한 영구자석이 회전자에 결합되어 있어 회전자에서 발생하는 발열이 아니라 고정자(전기자)에서 발생하기 때문에 모터 프레임에서 열을 효과적으로 분산시킬 수 있는 기계적인 설계가 필요합니다.
또한, AC 서보 모터는 구동측의 위치를 감지하는 검출기가 기본적으로 장착되어 있습니다. 동기기형의 경우에는 회전자와 고정자의 상대적인 위치를 알 수 있는 장치도 필요합니다.
요약하자면, AC 서보 모터는 프레임 내부 외벽에 코일이 감겨져 있고 회전자에 영구자석이 있는 형태의 모터입니다. DC 모터와는 달리 브러시와 정류자 간의 상호작용이 필요하지 않으며, 제동에 용이하고 다이나믹 브레이크를 사용할 수 있습니다. AC 모터는 고속 회전 영역에서도 최대 토크를 유지할 수 있으며, 열 분산을 위한 설계가 필요합니다. 또한 위치 검출기와 상대적인 위치를 알 수 있는 장치가 장착되어 있습니다.